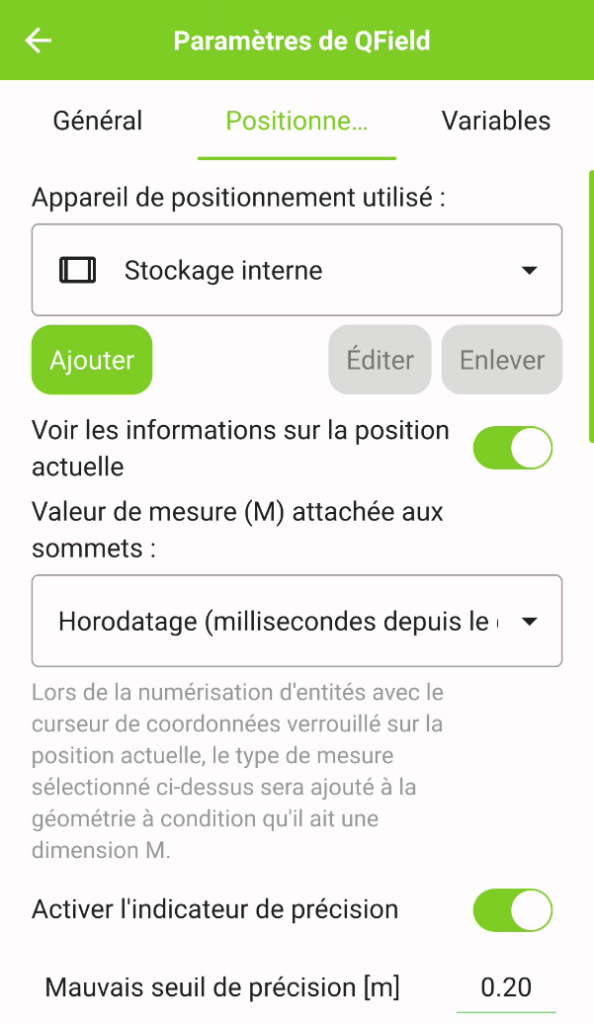
If you are planning to acquire and use later elevation coordinates, you must add the Z dimension when you create your survey layer (you can also add the M dimension, useful for storing the measurement timestamp)
Trimble Mobile Manager
First you need to connect the phone to the internal GNSS antenna
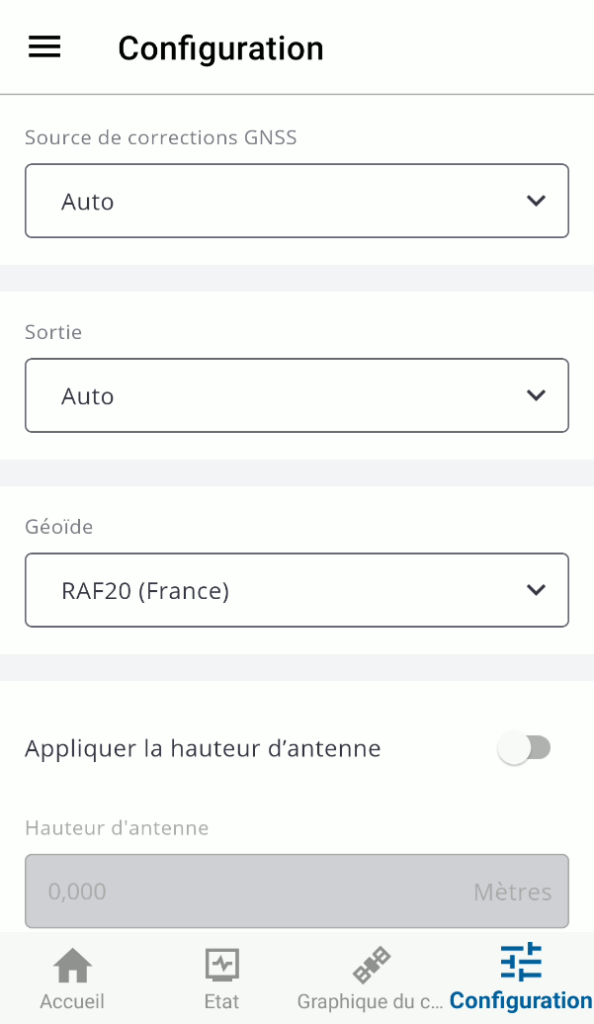
Now, go to the configuration tab and change Géoïde to RAF20 (France)
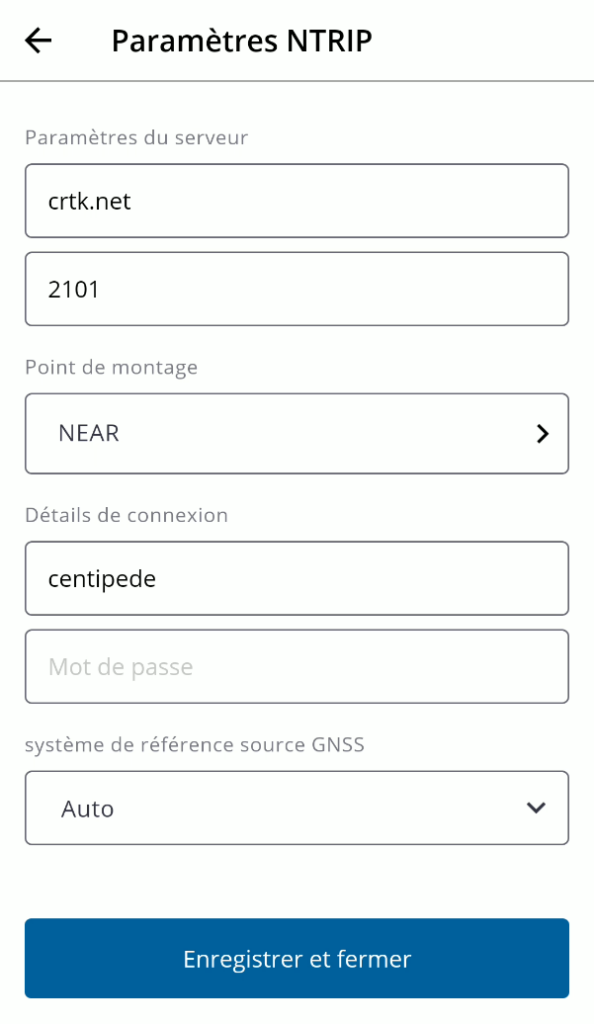
Define the source of correction as custom, and select NTRIP server
CRX is a Hatanaka compression for Rinex file used by many permanent networks. Y. Hatanaka of GSI wrote softwares for compress/uncompress, see https://terras.gsi.go.jp/ja/crx2rnx.html.
To use the software (example of CRX compression to uncompressed RNX format):
open a shell (e.g. Powershell)
go to the folder containing the executable
type “CRX2RNX.exe input.crx”
you get as output a RNX file that you can rename to .yyo
The gps epoch is in the sixth field, and the values are offset by 1 billion. To convert to date one can use Python.
>>> import datetime
>>> datetime.date.fromtimestamp(1315964785) #posix time of the GPS epoch including the 1 billion offset
datetime.date(2011, 9, 14)
>>> datetime.date.fromtimestamp(1315964782+57560982) # gps time of the dataset + the posix time
datetime.date(2013, 7, 11)
Clear introduction about Global and local referential (Lantmateriet) : “Positions determined by the GNSS method Precise Point Positioning (PPP) are in the same reference frame as the orbits, i.e. usually a realization of ITRS, e.g. ITRFyy, IGSyy or WGS84, where “yy” represents the year of the realization. The coordinates change with time in the ITRS realizations, because of the plate tectonics. Hence,the determined coordinates are given in the epoch of the observations. For practical applications like mapping and referencing spatial data , a static system/frame, which does not change with time, is desired. For this purpose, ETRS89 has been developed for Europe. ETRS89 coincides with ITRS at epoch 1989.0.”
Another simple reading about dealing with ITRS, ETRS and WGS84 is at Confluence website.
Nota : the transformations made by GIS software from WGS84 to local referential are precise at 1 meter only. For centimeter accuracy, use a geodetic software taking into account the velocities of the ITRF referential relative to the local referential (e.g. ETRF for Europe).
There are many WGS84 realizations. The latest compares with ITRF08 and ITRF14, see table below:
Year
Realization (Epoch)
For all practical purposes equivalent to:
1987
WGS 1984 (ORIG)
NAD83 (1986)
1994
WGS84 (G730)
ITRF91/92
1997
WGS84 (G873)
ITRF94/96
2002
WGS84 (G1150)
ITRF00
2012
WGS (G1674)
ITRF08
2013
WGS (G1762)
Compares to ITFR08 within 1cm Root Mean Square (RMS) overall
For US, WGS84 (G1762) is equivalent at 1cm to ITRF14. For France also ITRF14 ~ ITRF08 at less than 1cm, the transformation is given here http://itrf.ensg.ign.fr/trans_para.php
Example : converting from ITRFxx (epoch XXXX) to RGF93
We have made a GNSS survey in May 2020 that we want to convert to France official referential in a projection. The GNSS referential will then be ITRF14 (epoch 2020.1), and the French referential will be RGF93 with the associated projection Lambert93. In order to do so, we need to make some referential transformation, and also some conversion between cartesian coordinates, geographic coordinates and projected coordinates.
To transform ITRF14 (epoch 2020.1) to RGF93, use this site and choose ETRF2000 (epoch 2009) as equivalent to RGF93 (see this post), for the velocities you must choose the one of the nearest IGS station (positions and velocities given at ITRF official site or there or Euref site). Then to transform cartesian to geographic coordinates, use Circé IGN software. And finally, use also Circé to convert to projected coordinate system.
The main methods of GNSS processing are (1) the classical differential correction with a permanent base station, and (2) the Precise Point Positionning (PPP) method that does not require a base station and uses precises clock and ephemeris data.
The tools used can be softwares or web-services. Among software we can distinguish between commercial softwares (e.g. Trimble Business Center TBC), open-source softwares (e.g. RTKLib), and scientific softwares (Bernese, Gamit/Globk). We will introduce RTKLib and web-services.
RTKLib
RTKLib is the main open-source library and software to process GNSS data. It can do conversion, post-processing, navigation, plotting, and so on.
Note : Several versions of the software exist and they behave somewhat differently. I’ll try to describe them one by one but you’d better check carefully your results compared to another “official” reference in order to validate your process.
Versions of RTKLib :
Official software, with actual version 2.4.2. Does not work for me in post-processing as it is not possible to load base station Rinex data.
Emlid Fork here. Should be best for conversion of UBX (Emlid raw format) to Rinex. For what I can say, it worked for conversions, for post-processing of the base station, but it was not stable for post-processing of rover.
RTKLib_Explorer fork here. Located on the really rich blog about GNSS and RTKLib named RTKLibExplorer, this tool works well and is well documented. The setting of parameters for static processing and obtain a single position is hard (set ON for “Output Single for Sol outage” and set a value for Max Sol Std)
Complementary tools for dealing with POS files from RTKLib and CSV files from ReachView :
Cette procédure traite de la correction différentielle des associés au fichier SSF, acquis avec des appareils Trimble Juno SB, équipés des logiciels ArcPad8 et GPSCorrect.
Etapes
0.Le fichier SSF ne contient que des positions et non de l’information attributaire. Les informations attributaires sont contenues dans les fichiers SHP ou les AXF.
Pour réaliser la correction différentielle, vous devrez corriger le fichier SSF et ensuite réaliser la synchronisation entre le fichier corrigé COR et le fichier SHP ou AXF.
1. Copier les données de votre PAD (ex. Trimble Juno SB) sur le poste local. Mettre le fichier .ssf et les shapefiles dans un même répertoire.
2. Pour effectuer la correction différentielle, la méthode est d’utiliser l’assistant de correction de GPS Pathfinder Office disponible par le menu “Outils/Correction différentielle”. Vous obtenez alors un fichier GPSCorrect.cor.
A noter dans cet assistant, l’importance d’inclure dans le fichier “Cor” à la fois les positions corrigées et non corrigées (paramètres disponibles dans l’assistant, à la fenêtre “Paramètres de correction”, en cliquant sur “Changer”, dans l’onglet “Sortir”). Ce paramètre permet d’obtenir une correspondance exact entre le fichier SSF et le fichier COR.
3. Avant de procéder à la synchonisation, assurez-vous que les fichiers SHP (DBF, SHX….ou AXF seul) se trouvent dans un répertoire spécifique, dans lequel se trouvent également les fichiers SSF et COR….
4. Aller ensuite dans le dossier “Outils/Autre/ShapeCorrect” afin de lancer l’assistant de synchronisation.
6. Dans “ShapeCorrect”, cliquer sur “Parcourir” afin de sélectionner les fichiers SHP (ou le fichier AXF). Il n’est pas nécessaire de sélectionner les fichiers SSF et/ou COR, mais ils se doivent d’être présents dans le meme répertoire.
7. C’est à vous de décider si vous souhaitez dans les fichiers résultants les positions corrigées et/ou non corrigées.
8. Cliquer sur “OK” afin de lancer la synchro. Vérifiez le résultat de la synchronisation.